Our Progress So Far
Team Formed
March 2019
After passing the Gemstone team selection process, Team Autocycle (formerly SAFE-Bike) was established by 14 undergraduate students to develop an autonomous bicycle system to alleviate logistical hurdles faced by bikeshares.


Mentor Appointed
June 2019
Following consultation with Gemstone staff, Dr. Romel Gomez of the Department of Electrical and Computer Engineering was appointed as the faculty advisor to Team Autocycle. Dr. Gomez has been instrumental in providing the team with valuable feedback, access to resources, and sage advice.
Image Analysis and Simulation Begun
September 2019
With the start of the Fall 2019 semester, Team Autocycle began work on the first stage of its research, namely developing a simulator to model the behaviour of a bicycle under various control systems and training a classifier to identify objects important for bicycle navigation in a stream of images.

Bicycle Prototype Acquired
November 2019
While a proper simulation was important to save time by testing numerically prior to testing empirically, the team would soon enough need to have a physical prototype for experimentation. The chosen bicycle, christened "Otto von Cycle", would go on to be the platform for empirical testing and eventual modification for stability and navigation.
Empirical Characterization
November 2019
As work continued on coding the simulator and elements of the navigation system, parts of the team began work on empirical measuring the critical quantities of the bike frame such as the weight, center of mass, and moments of inertia of each of the four primary components. These values would eventually be used as parameters in the simulation and be important for properly tuning the stability control loop.

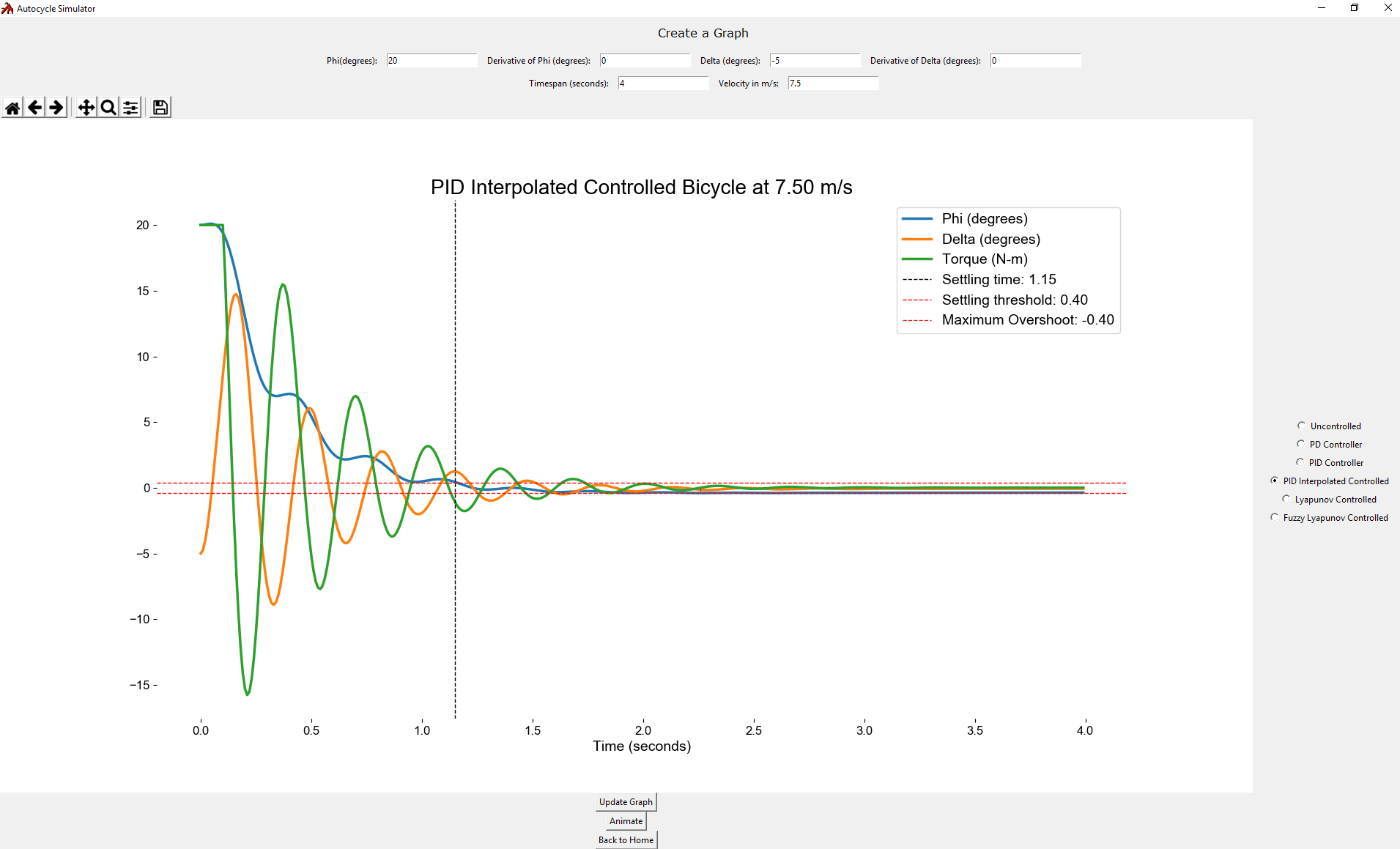
Simulation Completed
January 2020
As January drew to a close, a fully functional version of the simulator was put into service. The program could simulate the behaviour of an arbitrary bicycle traversing a flat plane in its linear region subject to an arbitrary control function with arbitrary initial conditions. As the semester went on, additional features, including a PID autotuner, would be integrated into the system.
Thesis Proposal Defense
February 2020
At the beginning of Spring 2020 semester Team Autocycle presented its final Thesis Proposal to a committee including Gemstone staff, the team's mentor and librarian, and an outside expert, Dr. William S. Levine of the Department of Electrical and Computer Engineering and the Institute for Systems Research. The team outlined its plans for answering their research questions through the development of the autonomous bicycle system and how these plans would be executed.


Initial Firmware Integration
February 2020
With the simulation in a fully working state, it was time for the team to move on to writing code to control and sense from the actual Autocycle prototype. To that end, a drive motor was acquired, its input and controls characterized, and code for a microcontroller began to be developed to execute the tuned control loop on the physical prototype in real time.
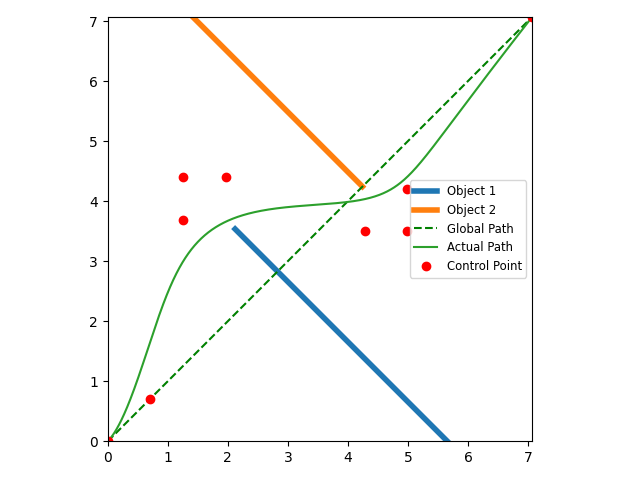
Local Path Planning
February 2020
On the navigation side of the project, with a sufficiently robust image analysis system developed it was necessary to move on to generating local paths for the bicycle that could avoid the detected obstacles. This was done using bezier curves, which after translating an obstacle into a straight line obstruction could ensure the path from the designated start and end points would not collide with any blockers.
Prototype Modifications
March 2020
Moving into late spring, the team began preparing the prototype chassis to be outfitted with sensing and actuation equipment. This required several modifications to the chassis itself to accommodate the drive motor's mounting on the hub and the attachment of the front handlebar control servo motor.
Machining and Actuator Integration
October 2020
Going into the Fall of 2020, Team Autocycle began turning its theoretical and simulated results into practice. Having acquired appropriate actuators to exert the necessary control torques on the prototype, the team deployed and refined the stabilization firmware while also machining the required custom components to couple said actuators to the Autocycle prototype.
Do Good Showcase
November 2020
In November of 2020 the team presented its findings so far to their peers, Gemstone faculty and staff, and the Do Good Institute of the University of Maryland. The presentation detailed the team's rationale for pursuing the project, its expected deliverables, the progress that has been made to achieving the team's goals, and how the project's outcome will Do Good.
Initial Self-Balancing Experiments
January-March 2021
Beginning in the winter of 2021, the team began carrying out experiments to test the control laws meant to ensure the self-balancing of the bike. These experiments gave the team experience in data collection and procedure, while also revealing flaws in the hardware of the Autocycle prototype, including weakness in the tensioner, coupler, and other components.
Zero Speed Stability System Design
April-June 2021
One of the issues revealed by initial testing was the need for a system to keep the Autocycle prototype level before it had gotten up to speed and was able to exert control authority via steering torque. To resolve this, a set of deployable training wheels was designed and christened the Zero Speed Stability system (ZSS).
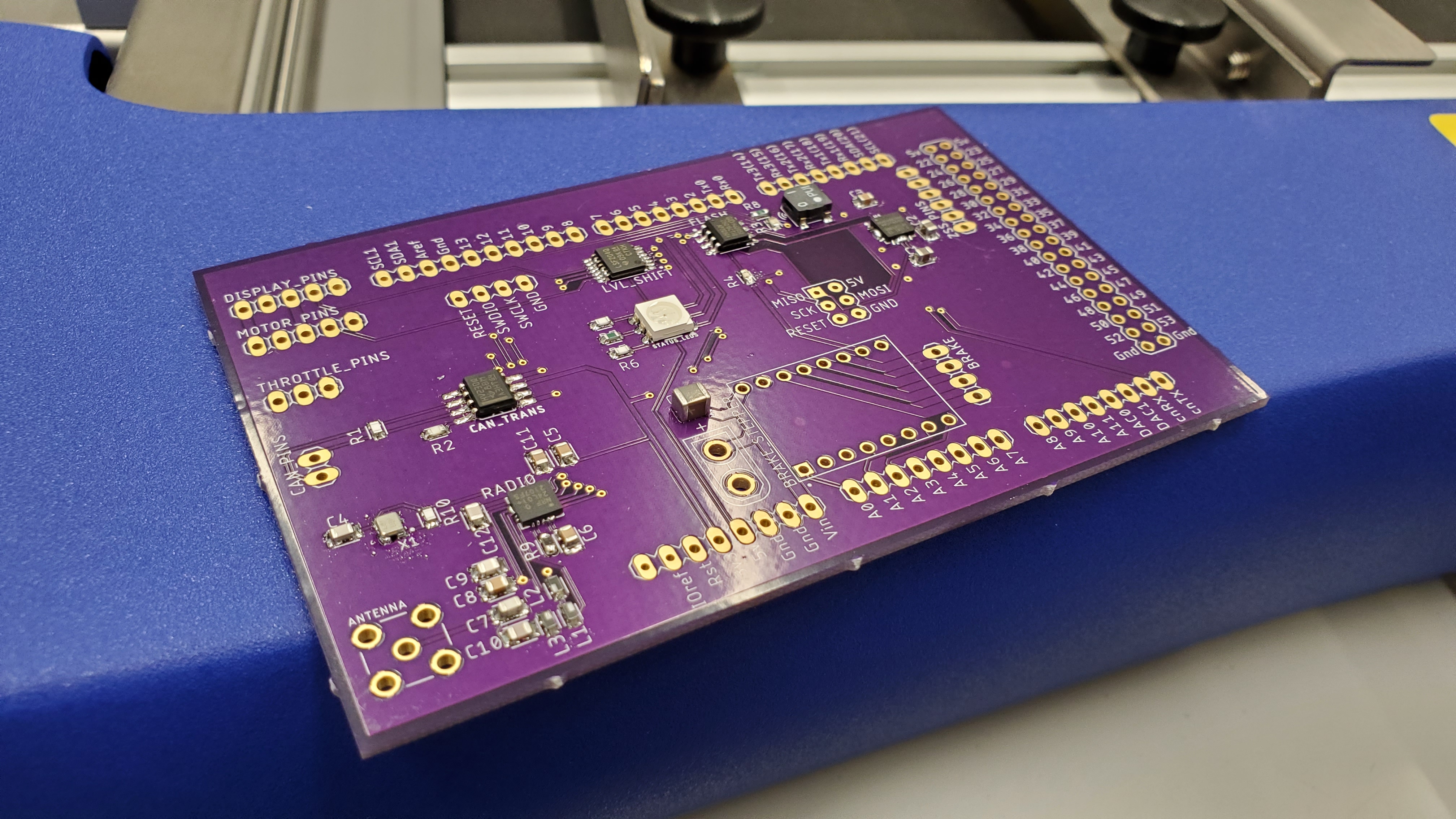
Custom Electronics and Hardware
April-June 2021
At the same time, work was done to improve issues identified with other hardware elements (by upgrading to stronger materials and manufacturing methods), and electronics. Notably, a custom circuit board was designed to integrate higher capacity data logging, brake control, and radio telemetry.
Experimentation and System Identification
July-November 2021
The Stability subteam continued experiments with the new hardware, increasing the frequency and tempo of experiments, and used data based methods to perform system identification on the parameters of the system to find more robust control gains.
Local Path Planning Experiments
September-November 2021
In parallel, the Navigation subteam carried out experiments to validate their obstacle detection and path planning algorithms at low speed, with the ZSS deployed. This process revealed many areas for improvement and helped the team solidify its code in preparation for integration with Stability.
Successful Self-Balancing
December 2021
After much work tuning gains, debugging firmware and hardware issues, and adjusting system model parameters, the team was able to arrive at a control that successfully balanced the Autocycle over a significant distance and rejected disturbances.
Heading Control
Winter 2022
In 2022 the team built on top of the proven stability and steering control to implement a cascaded proportional heading controller to keep the Autocycle headed in a commanded direction. This controller was demonstrated and validated.